用于控制四旋翼飞行器和敏捷机器人的深度学习和模型预测控制框架
近年来,计算机科学家开发了越来越先进的算法来控制机器人代理的运动。其中包括模型预测控制(MPC)技术,该技术使用代理动力学模型来优化其未来行为以实现给定目标,同时满足许多约束(例如,不能撞到障碍物)。
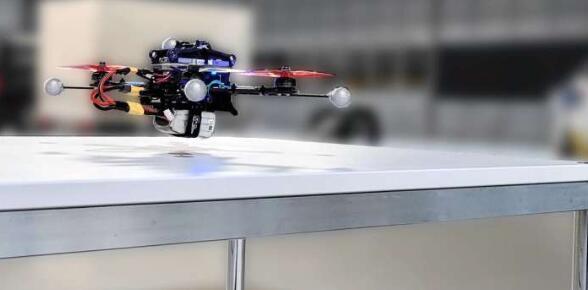
慕尼黑工业大学和苏黎世大学的研究人员最近创建了实时神经MPC,这是一个将基于人工神经网络(ANN)的复杂模型架构集成到敏捷机器人(即四旋翼飞行器——具有四个旋翼的无人机)的MPC框架中的框架。这个概念在IEEE Robotics and Automation Letters中提出,建立在苏黎世大学机器人和感知小组开发的先前方法之上。
“我们遇到了由Davide Scaramuzza领导的机器人和感知小组的出色工作,并立即被吸引到他们的核心思想之上,即让数据驱动(学习)组件促进'传统'控制算法,”慕尼黑工业大学自主空中系统小组的研究人员Tim Salzmann和Markus Ryll告诉Tech Xplore。
“在我们制定了一个概念验证来推广他们的方法(使用高斯过程(GPs)到通用神经网络(深度学习模型)之后,我们向苏黎世大学的机器人和感知小组提出了我们的想法。从那时起,两个实验室之间的技术工作和实验共同推进,引发了新的合作。
Salzmann,Ryll及其同事提出的新框架结合了深度学习模型和MPC的在线优化。富有表现力的深度学习模型的计算量很大。然而,通过实时在线近似它们,该框架可以利用专用硬件(GPU)来有效地处理这些模型,从而使他们的系统能够实时预测机器人的最佳动作。
“实时神经MPC框架允许两个领域的结合,最佳控制和深度学习,同时允许两个部分利用各自高度优化的框架和计算设备,”Salzmann和Ryll解释说。“因此,我们可以在GPU上的PyTorch / Tensorflow中执行深度学习计算,而控制优化则在CPU上的编译C代码中执行。这允许在以前无法实现的应用中使用深度学习的力量,例如在四旋翼飞行器的机载最佳控制中。
研究人员在一系列实验中评估了他们的框架,无论是在模拟环境中还是在现实世界的环境中。在这些测试中,他们专门使用它来实时控制高度敏捷的四旋翼飞行器的动作。
他们的结果非常有希望,因为它们可以利用神经网络架构的预测能力,其参数化能力比以前用于实时控制敏捷机器人运动的参数容量大4倍以上。他们还发现,与没有深度学习组件的传统MPC方法相比,他们的框架可以将位置跟踪误差减少多达000%。
“在机器人技术中,我们寻求受控系统动力学及其与环境相互作用(例如空气动力学效应,轮胎摩擦等)的表达模型,”Salzmann和Ryll说。“虽然这些通常很难通过分析来制定,但基于学习的方法,尤其是神经网络,可以捕捉动态和交互效应。但是,模型精度与神经网络的大小成比例。实时神经MPC能够使用深度学习模型,与以前在模型预测控制中可行的模型相比,它的功能和性能要高得多。
正如最近发布的Nvidia Jetson平台所证明的那样,GPU芯片正逐渐进入嵌入式系统。这组研究人员创建的框架可能很快允许开发人员利用先进的数据驱动人工智能技术的高预测能力来更好地模拟集成GPU芯片的机器人的动力学及其与环境的交互,从而降低事故风险并提高其导航能力。
“未来的研究有很多开放的途径,”Salzmann和Ryll补充道。“深度学习方法的一个问题是,对于不属于训练数据(非分布OOD)的情况,它们的输出可能是不稳定的。检测这些情况并为控制提供回退以稳定系统将导致在 OOD 情况下的鲁棒性。